Home
Description
 |
 |
|
| Name | V-3 |
HR-V1 |
| Description |
First version of a two legged robot with the freedom of movement of the human lower body. |
Upper body with ball bearing joints and a vision-system as head. Designed for combination with a revised version of V-3. |
| Freedom of movement | 12 act. DOF |
14/16 act. DOF |
| Dimensions | H 30cm, W 21cm, D 11cm |
H 20cm, W 25cm, D 6cm |
| Weight | 1200g |
750g |
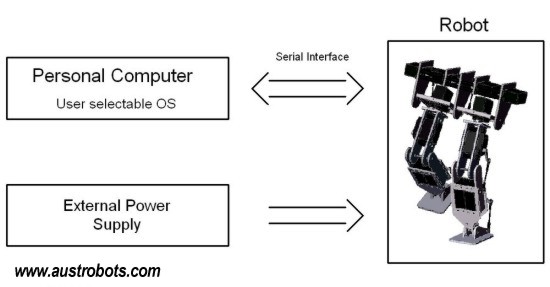
| Power supply | external |
external/battery |
| Speed | ca. 2cm/s |
- |
General Configuration